

【ステッピングモータ】
今月は腕時計やFAX、プリンタなどのPC周辺機器、エアコンのルーバー制御などに幅広く利用されているステッピングモータについてのお話です。2008年1月号においては“時計用モータ”としてのステッピングモータを取上げましたが、今回はモータの回転原理による分類の見方から、改めて詳細な解説をさせていただきます。
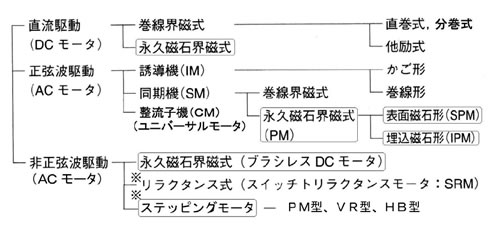
ステッピングモータ(Stepping Motor)は、別名ステッパーモータ(Stepper Motor)、パルスモータ(Pulse Motor)などと呼ばれています。下図分類のように、原理はブラシレスDCモータと類似していますが、ブラシレスモータと異なる大きな特徴はパルス電流(電力)に対応して回転することです。
1.ステッピングモータの原理
ステッピングモータは直流電源、水晶振動子およびIC回路によって正確なパルス電流を発生させ、それによってステップを踏むように、一定角度(ステップ角)ずつ間欠的に回転するように設計されたモータです。基本的には永久磁石のロータ(回転子)と電磁石を組み合わせたPM型(永久磁石型)と、コイルの発生する磁界で強磁性体の歯車を回すVR型(可変リラクタンス型)に大別されます。
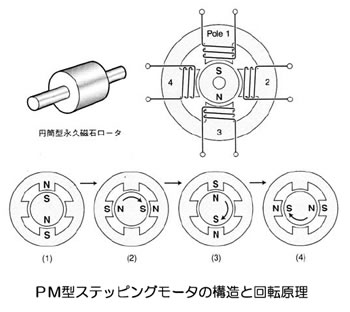
ここで、PM型ステッピングモータの動作原理と構造を右図に示します。ロータは径方向に2極着磁された磁石で、本例では周囲に4つの電磁石が配置されたモータになります。
そこで右図のような極配置になるような方向に、1~4の電磁石にパルス電流をICで切り替えながら送り込むと、これに同期して磁石と電磁石間に吸引力と反発力が発生して、ロータが回転します。この場合は1回パルス電流を送り込むと1/4回転(90°)回転PM型ステッピングモータの構造と回転原理し、連続パルスによってその回転が歯車に伝達されます。
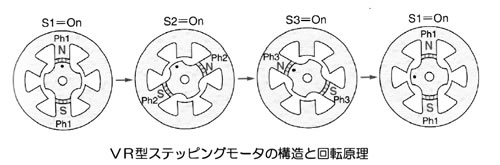
ステッピングモータでは、ロータがある角度だけ回転して停止した後、その位置を保持することが要求されます。このためには、電流によって励磁されたポール(Pole:大きな歯または極歯)がロータの歯と磁力によって整列するという原理を利用します。ステータとロータの歯数の比率が6:4の構造では、この原理による位置決め分解能は1回転について12となります。つまり、30°間隔での位置決め可能です。 高分解能を実現するための方策としては、ポールに細かい歯を刻み、ロータの歯も同様に細かくする方法が採られます。このように、永久磁石を使わないステッピングモータをVR型ステピングモータ(Variable Reluctance stepping motor)と呼びます。
歴史を振り返ると、工作機械やコンピュータ周辺装置用としていろいろな形式のVR型モータが製造されました。VR型の利点は、機械加工によって細かい歯を刻み、またステータとロータ問のギャップ長を短くすることによって、高い分解能が実現現できる点にあります。欠点としては、小型化と大トルク化の両立が困難なことです。そのために今日では、VR型はステッピングモータとしてよりは、むしろブラシレスモータの一種であるスイッチドリラクタンスモータ(Switched Reluctance-Motor:SRM)としての利用に関心が集まっています。
2.時計用ステッピングモータ
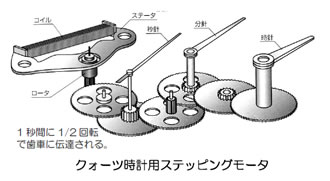
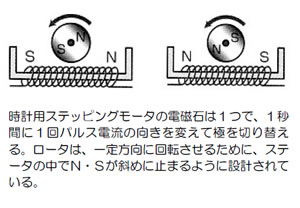
右図は腕時計用のステッピングモータです。ステップ角は180°で、1回/1秒のパルス電流により1/2回転ずつ動きます。
なお、ロータに利用される永久磁石はサマリウムコバルトボンド磁石から同焼結磁石に移り代わり、最近ではネオジム焼結磁石やネオジムボンド磁石の利用が検討されているようです。
3.その他のステッピングモータ
以上の時計用ステッピングモータはそのステップ角からみると特殊の部類に入り、一般のステッピングモータはより一層細かなステップ角を刻みます。最近ではリング形状のネオジムボンド磁石の採用に時計用ステッピングモータの電磁石は1つで、1秒間に1回パルス電流の向きを変えて極を切り替える。ロータは、一定方向に回転させるために、ステータの中でN・Sが斜めに止まるように設計されてる。よって、1周100ピッチ以上の多極着磁も可能になりました。また、1ピッチを細分化した回転が起きるように設計されたPM型とVR型を組み合わせたハイブリッド型(HB型)ステッピングモータも開発され、1周400ステップ以上のステップ駆動も可能となっています。
4.初期のクォーツ腕時計[ゼンマイ・歯車からIC・電子部品へ]
時計が高価な精密機械から電子製品に変貌したのは、およそ40年前でした。ゼンマイと歯車から水晶発信器とIC回路の電子部品の組み合わせだけのデジタル表示腕時計に続き、それに小型モータを組み込んだアナログ表示腕時計が実用化されました。特にアナログ腕時計は当時工業化されたばかりの希土類磁石を使ったステッピングモータを組込んだ画期的なものでした。右図は世界最初のクォーツ腕時計で、1-5系サマリウムコバルトボンド磁石を利用したPM型ステッピングモータが使われていました。

以上のようにステッピングモータは、入力パルスの数に比例して回転角度が、また入力パルスの周波数に比例して回転速度が変化するため、フィードバック制御や位置センサーがなくてもモータの制御をすることができ、比較的簡易な構造での位置決め制御に数多く使われています。
(参考資料)
「じしゃく忍法帳”吉岡安之 著 TDK編 (日刊工業新聞社)
「トコトンやさしい磁石の本」山川正光 著 (日刊工業新聞社)
「小型モータのすべてがわかる」 見城尚志、佐渡友 茂、木村 玄 著 (技術評論社)
「よくわかる最新モータ技術の基本とメカニズム」 井手 萬盛 著 (秀和システム)
「自動車用モータ技術」 堀 洋一、寺谷 達矢、正木 良三 著 (日刊工業新聞社)