

宇宙航空研究開発機構(JAXA)は10月3日、探査機「はやぶさ2」が小惑星リュウグウの上空1キロまで接近し、表面に向け小型探査ロボット(ローバー)「MINERVA-II2」を放出したと発表しました。
残念ながら「MINERVA-II2」は内部のデータ処理の不具合により、本来の機能・役割は果たせなかったようですが、その代わり「リュウグウ」の重力調査のために5日ほどかけて「MINERVA-II2」が表面に落ちるまでの様子を観測して、はやぶさ2の小惑星での仕事は全て終わりました。これからは地球帰還に向けた準備を進め、11~12月にリュウグウを出発します。来年末の地球帰還まで頑張って欲しいですね。
さて、今月はロケットの航法、誘導方法、姿勢制御方法などについてお話をしたいと思います。
[ロケットの原理-6]ロケットの誘導制御
ロケットのコースは飛翔の最終目標によって決まります。その目標を実現するために、推力の大きさや、推力の方向を調節するスケジュール、飛翔経路とそれに沿った速度・姿勢の履歴などが決められます。誘導制御は、できるだけ飛翔前に立てた計画に近い飛翔をロケットに行わせようとするアクションです。
飛翔中の「誘導制御」と呼ばれるオペレーションは、三つの機能から成り立っています。それらは「航法」、「誘導」、「姿勢制御」というものです。一般に「誘導制御」という言葉で概括されているこれらのオペレーションを、以上の三つの要素に分けて考えることが合理的です。これらが相挨って、ロケットは予定のコースをたどれるのです。
一般に「誘導制御」という言葉で概括されているこれらのオペレーションを、以上の三つの要素に分けて考えることが合理的です。これらが相挨って、ロケットは予定のコースをたどれるのです。
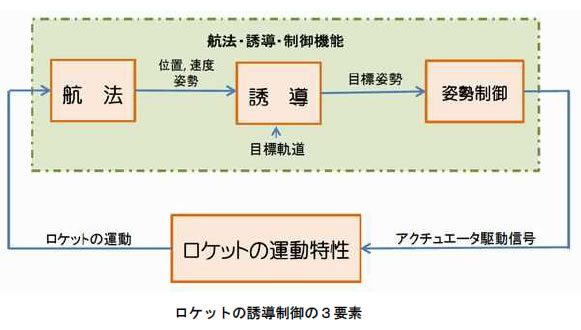
<航法>
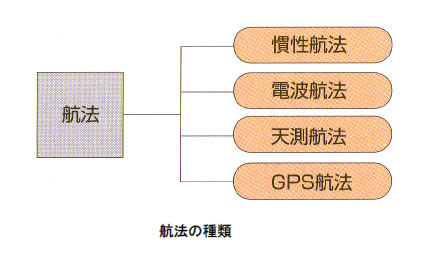
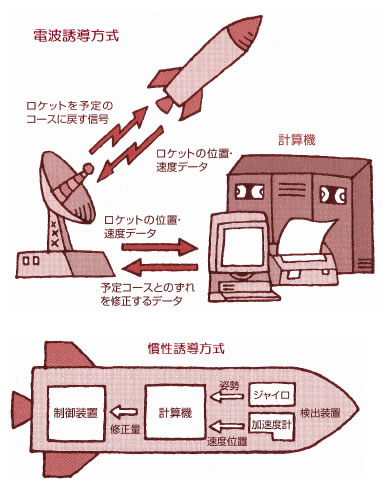
まずロケットの位置・速度・姿勢を知らなければなりません。この作業を「航法」と呼びます。代表的な航法は、位置・速度を地上のレーダーで知り、さらに姿勢をロケットに搭載したジャイロで知る「電波航法」と、位置・速度・姿勢を搭載した機器によって知る「慣性航法」です。たとえば「慣性航法」の場合は、ジャイロと加速度計の出力を積分することによって、必要なデータを得ます。
<誘導>
ロケットは、飛翔中にいろいろな外乱を受けたり、自身の性能のずれなどから、飛翔経路に誤差を生じます。その誤差を修正して目標の軌道に所定の精度で投入するオペレーションを「誘導」と呼びます。誘導に必要な計算は、搭載コンピュータまたは地上のコンピュータによって行われます。
<姿勢制御>
誘導の任務を達成するためには、ロケットの向きを所定の方向に向けることが必要で、このオペレーションを「姿勢制御」と呼んでいます。誘導の計算によって、新たな目標姿勢を弾き出したコンピュータは、必要な姿勢変更のアクションを姿勢制御用のハードウェアに、電気信号によって指示します。この搭載コンピュータの指示する目標姿勢に向けるオペレーションが「姿勢制御」です。
[ロケットの原理-7]ロケットの航法
ロケットに所定のコースをたどらせるためには、まず飛んでいるロケットの位置・速度・姿勢をリアルタイムで知る働きが不可欠です。このオペレーションが「航法」です。
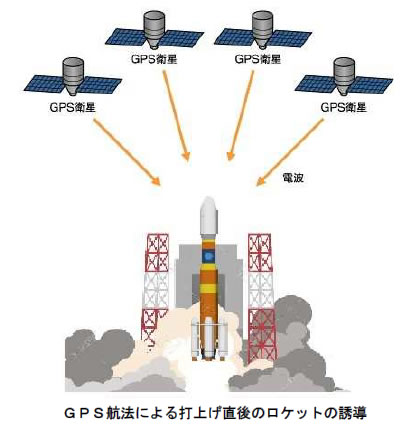
「慣性航法」と「電波航法」の他には、探査機が星を観測して相対位置から自分の位置を定める「天測航法」、複数のGPS衛星から発信される時刻と軌道の情報から、GPS衛星との距離や距離変化率を求めることによって自分の位置・速度を決める「GPS航法」があります。
<慣性航法>
現在最も多く用いられているのは慣性航法です。慣性航法の精度は、加速度計やジャイロなどの「慣性センサ」と呼ばれる搭載計器に依存し、時間が経つにつれて誤差がたまっていくので、長期間にわたるミッションでは、慣性航法と精度の高くなってきたGPS航法と組合わせる「複合航法」が多くなっています。「はやぶさ」、「はやぶさ2」では、カメラによる光学情報を巧みに組合わせました。
ジャイロは、ロケットの重心のまわりの回転運動のようすを検出するために使われる装置です。ジャイロの原理は、地球ゴマに見られるものです。まわっているコマの軸は、一定の方向を向く性質があります。そのため、地球ゴマをまわしておき、手でコマの軸の向きを変えようとすると、手に力を感じます。ロケットの向きが基準からずれると、ジャイロは、自分の軸の向きを変えようとするこの力を感じることによって、ずれの大きさを検出するわけです。 加速度計の原理はエレベーターに乗せた台ばかりのようなものです。エレベーターが止まっている時は、台ばかりの針は正しく乗せた物の重さを指しますが、エレベーターが上下に動くと、針は重い方を指したり軽い方を指したりします。加速度計は、この針の動きを検出するものです。加速度を打上げの瞬間からすべて合計すれば、その時の速度が分かります。すると速度の方も基準からのずれが判明します。
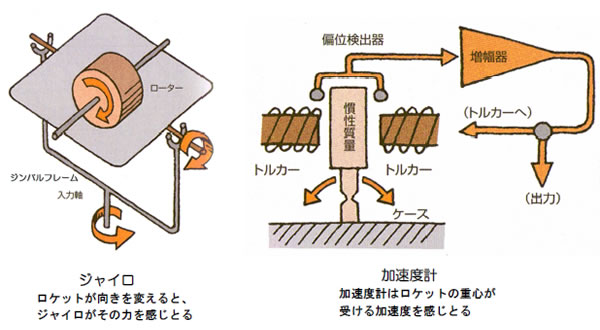
通常この回転体(コマ)を縦、横、高さ方向の三軸にそれぞれ1個、計3個をロケットに取り付け、ロケットの姿勢が変わったときに、この回転体(コマ)にかかった力を電気的に測定して、ロケットの姿勢の変化を検知します。ロケットの中のジャイロと加速度計をまとめて「慣性センサ」と呼び、これらをつめた箱を「IMU」(Inertial Measuring Unit、慣性センサユニット)といいます。IMUには、「プラットフォーム方式」と「ストラップダウン方式」の2つがあります。

「プラットフォーム方式」は空間に対して、IMUを一定の姿勢に保つ方式です。宇宙開発事業団(現 宇宙航空研究開発機構(JAXA))のH-Iロケットは、プラットフォーム方式を採用していました。
一方、「ストラップダウン方式」は空間に対してIMUをロケットに固定する方式です。ストラップダウン方式は、プラットフォーム方式に比べて低重量、小型、低消費電力、高精度というふうに技術的には優位ですが、機体の運動を検出するための入力角度範囲の広いジャイロと、座標変換を行うための高速搭載計算機が必要になります。宇宙開発事業団(現 宇宙航空研究開発機構(JAXA))のN-IIロケット、H-IIロケットはストラップダウン方式を採用していました。また現在でもH-IIAロケットやH-IIBロケットでは引き続きストラップダウン方式を採用しています。

<電波航法>
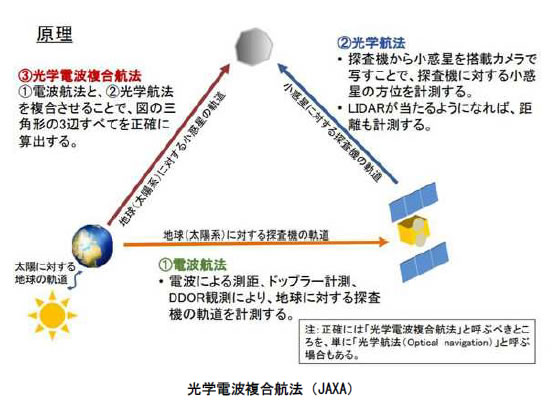
ロケットの電波誘導方式は、電波航法によってロケットの軌道(位置、速度)を推定し、地上の打上げ支援システムの計算機で誘導指令(目標姿勢変更量やエンジンカットオフ指令など)を計算し、地上からの電波リンクで誘導指令をロケットに送信し、これに基づいてロケットが姿勢などの制御を行う方式です。例えば宇宙航空研究開発機構(JAXA)のM-Vロケットでは、精測レーダーで距離と方位角、上下角を観測し、レーダー観測量のノイズを除去するためのカルマンフィルタにより、現在の軌道(位置、速度)の推定とともに、将来(例えば、ロケット燃焼終了時)の軌道予測も行っています。誘導指令の計算は地上の計算機で行い、例えば、2段ロケット燃焼終了時の遠地点高度や速度などを評価関数として最適計算を行い、姿勢操作量を計算し、測距用のレーダーのリンクに乗せて、M-Vロケットに誘導指令を送ります。実際の「はやぶさ2」では、下図のような複合航法を採用しています。
<GPS航法>
GPSを始めとした衛星測位システムは、高度約2万km付近の軌道に衛星を展開しています。それぞれの衛星は地表に向けて測位信号を載せた電波を送信しています。つまり、衛星測位システムよりも低い高度を巡っている衛星も、測位衛星の電波を受信することで自分の位置を知ることができます。それどころか、現在では衛星測位システムの電波の漏れを利用して、より高い高度を巡る衛星の位置を調べる試みも始まっています。
衛星測位システムは、衛星の軌道決定だけではなく、衛星を打ち上げるロケットの管制・誘導にも使うことができます。
ロケットは衛星を狙った軌道へ高精度に投入するため、自分が今どの場所をどの速度で飛んでいるかを監視して、必要に応じて噴射の方向を変えて飛ぶ方向を修正します。前項でお話をしましたように、通常は、1)内部で加速度を計測してロケット速度や位置を計算で割り出す慣性誘導、2)地上からレーダーでロケットの飛行経路を計測する電波誘導 ─── という2つの手段を使います。
測位衛星システムで飛行中のロケットの位置を測定できるようになると原理的には、高精度のロケットの管制・誘導が、高価な慣性誘導装置や、電波誘導のための大がかりな地上設備などを使わずに可能になります。
とはいえロケットは、打ち上げから30分程度の短い時間の間に地上から宇宙、つまり射点状に置かれた静止状態から宇宙空間での軌道速度までと、位置や速度が大きく変化する。その途中のどの段階で搭載機器にトラブルが起きてもすぐに致命的事態となるという特徴を持っています。このため現状では、航法衛星システムを慣性誘導や電波誘導と組み合わせてより安全な打ち上げを行えるようにするという方向で開発が進んでいます。
[ロケットの原理-8]ロケットの誘導
「航法」がリアルタイムにロケットの位置、速度、姿勢を正確にとらえる方法に対して、ロケットが飛翔中に受ける外乱やロケット自身の性能のずれなどから生じた飛翔経路の誤差を修正して、目標の軌道に所定の精度で投入するオペレーションが「誘導」です。
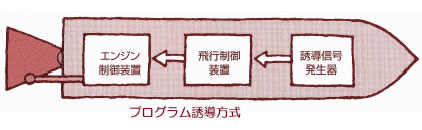
<プログラム誘導>
最も初歩的な誘導の方式は、あらかじめ決めた姿勢変化の履歴を搭載コンピュータに憶えさせておいて、外乱が来ても予想外の性能が出ても、断固として計画どおりに飛ばす、「プログラム誘導」です。
これはフィードバックがないやり方ですから、目標軌道に高い精度で投入することができません。
<電波誘導・慣性誘導>
飛行中のロケットのリアルタイムの位置・速度の情報に基づいて、ロケットの姿勢変更を実行する閉ループのやり方には、航法の方式に準じて「電波誘導」と「慣性誘導」があります。電波誘導は、地上でロケットの飛行を見守ることができますが、地上から見えているうちしか誘導できないし、さらに誘導の精度が低くなります。慣性誘導は、打上げ後に地上局の助けが要らず、ロケットが自分の力で目標に向かって高精度で飛ぶので、大変便利な誘導方法です。
<間接誘導・直接誘導>
誘導のための指令信号をコンピュータが発しなければならないので、その信号を生み出す計算機のプログラムを準備しなければなりません。その誘導則の考え方に、「間接誘導」と「直接誘導」とがあります。
間接誘導は、飛行前に決めた目標とする標準経路(ノミナル軌道)に誤差が生じた時に、ノミナル軌道に戻すよう誘導するやり方です。これは飛翔中の実時間処理は少ないのですが、飛行前にはさまざまな事態を想定したパラメータ調整が必要になります。
直接誘導の方は、飛翔中の現在の状態と目標軌道で決まる状態とを満足する、いわゆる二点境界値問題の最適な近似解を、搭載コンピュータによって実時間で求めながら飛翔していく方式です。搭載コンピュータの性能向上がめざましいので、最近の大型ロケットでは直接誘導が多くなっています。
[ロケットの原理-9]ロケットの姿勢制御
飛翔中のロケットの姿勢を、種々のパーツによって制御誘導コンピュータの指示する目標姿勢に向けるオペレーションが「姿勢制御」です。
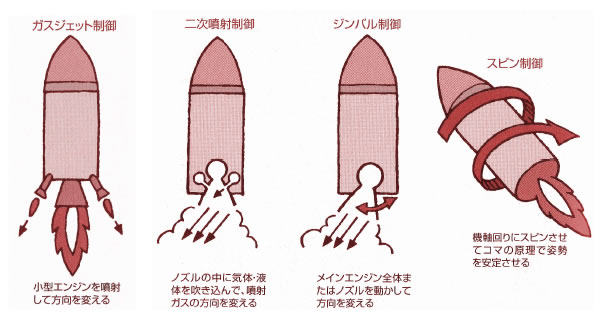
<ガスジェット制御>
ガスジェット制御は、主エンジンとは別に小型のスラスターを配置し、そこからガスを噴出させてその反動で制御する方式です。サイドジェットとも呼ばれます。窒素ガスをそのまま吹き出すコールド・ガスジェットがよく用いられます。
<二次噴射制御>
二次噴射制御は、ノズルの途中にたくさんの穴を開けておき、コンピュータが指示する穴から液体や気体を吹き出して、ノズル内の主流の向きを変えることで制御する方式です。固体ロケットで多く用いられているやり方です。
<ジンバル制御>
ジンバル制御は、いわゆる首振りノズルで、ノズルをある支点のまわりに回転させることによって噴出ガスの向きを変えます。ノズルを少し傾けるだけで大きな制御モーメントが発生するので、現在のロケットで多用されています。
<スピン制御>
スピン制御は、ロケットを機軸まわりにスピンさせて姿勢を一定方向に維持しようとするものです。ロケット飛行の最終段階で衛星の軌道投入姿勢を決めると、あとはロケットと衛星が一体のままスピンさせ姿勢を保持させた状態で、最後の点火を行わなければなりません。ほかにも、観測ロケットなどでも外乱が来ても姿勢を保持したい時に使われます。
以上、今月はロケットの航法、誘導方法、姿勢制御方法などについての話でした。次回は日本のロケットと世界のロケットの比較や日本および世界のロケット発射場、ロケット発射の条件などについて調べてみる予定です。
<参考・引用資料>
「NASAホームページ」
「JAXA・宇宙情報センター」ホームページ
「Wikipedia」
「宇宙の謎・宇宙開発の歴史」ホームページ
「トコトンやさしい宇宙ロケットの本」日刊工業新聞社